Связь систем сбора информации с ЭВМ верхнего уровня
В гибких производственных системах (ГПС) и АСУ ТП обычно имеются два уровня управления: верхний, на котором располагается центральная ЭВМ системы, и нижний, на котором находятся терминальные системы управления (ТСУ). Связь между ними может быть реализована по радиальному, магистральному и комбинированному (магистрально-радиальному) принципу. Следует отметить высокую структурную надежность радиального канала, поскольку выход из строя одного приемопередающего устройства в ТСУ или общей ЭВМ, а также обрыв индивидуальной шины нарушают обмен данными лишь с одной ТСУ и не влияют на работу остальных. Радиальность обеспечивает быструю реакцию общей ЭВМ на запросы ТСУ и соответственно малое время ожидания устройств нижнего уровня на обслуживание. Преимущества радиальной структуры достигаются дополнительными затратами оборудования (интерфейсные блоки, кабели, разъемы и т.д.).
Радиальные интерфейсы подразделяются на симплекные, полудуплексные и дуплексные. Они могут быть параллельными, последовательными и последовательно-параллельными в соответствии с формой передачи цифровых данных. Процедуры ввода-вывода строятся на синхронном или асинхронном принципе [16].
Известны многочисленные способы реализации интерфейсов. Для сравнения выберем интерфейс для радиального подключения устройств с параллельной передачей информации - ИРПР и интерфейс для радиального подключения устройств с последовательной передачей информации - ИРПС [23]. Выбор обусловлен широким применением этих интерфейсов в современных мини- и микро-ЭВМ. Из таблицы 5.1 видно, что последовательная схема передачи данных превосходит параллельную практически по всем технико-экономическим показателям, за исключением скорости обмена.
Таблица 17.2 - Сравнение радиальных параллельного и последовательного интерфейсов
| Характеристика | ИРПР | ИРПС |
|
Минимальное число соединительных проводов для односторонней передачи данных Тип линий связи Скорость передачи данных Длина линий связи Перекрестные и прочие помехи Стоимость интерфейсных плат Ввод в эксплуатацию Уровни сигналов: «1» «0» |
12 Многожильный кабель связи 20 Кбайт/с До 15 м Основная проблема Примерно одинаковая Сложный 0-0,4 В 2,4-5,25 В |
2 Витая пара или пары свитых проводов в телефонном кабеле связи 9,6 Кбод (в перспективе 24 Кбод и 48 Кбод) До 500 м при 9,6 Кбод Не составляет проблемы Примерно одинаковая Простой от 20 до 50 мА (40 мА токовая петля) или 15-25 мА (20 мА токовая петля) 0-5 или 0-3 мА |
Интерфейс ИРПС позволяет осуществлять асинхронную передачу постоянным током (токовая петля) по четырехпроводной дуплексной связи. В технически обоснованных случаях допускается и цепь взаимосвязи, которая указывает состояние устройств, участвующих в обмене информацией. Двухпроводные линии обычно выполняются витыми парами. Тип кабеля, тип разъема и назначение контактов не регламентированы, но должны быть соблюдены требования к быстродействию. Время фронта импульса источника на нагрузке R = 100 Ом (без линии связи) должно быть меньше или равно 1 мкс (![]() мкс), время фронта импульса на входе приемника
мкс), время фронта импульса на входе приемника ![]() мкс (с учетом линии связи).
мкс (с учетом линии связи).
Формат передаваемой информации приведен на рисунке 5.3. Сначала всегда следует стартовый бит, затем информационные разряды (пять-восемь), в конце бит контроля (на четность или нечетность) и два стоповых бита. При отсутствии передачи в линии уровень тока соответствует единице, стартовый бит всегда имеет нулевой уровень тока, а стоповый - единичный. Два стоповых бита используются для устранения возможности рассинхронизации. Передача ведется младшими разрядами вперед.
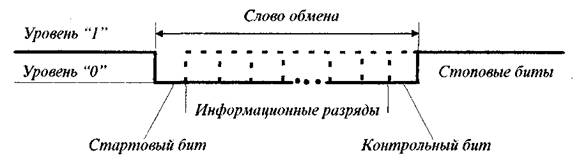
Рисунок 17.4 - Формат данных ИРПС
Введем для ИРПС коэффициент формата передаваемой информации
![]()
где ![]() - разрядность соответственно стартовой посылки, информационных разрядов, контрольных и стоповых битов.
- разрядность соответственно стартовой посылки, информационных разрядов, контрольных и стоповых битов.
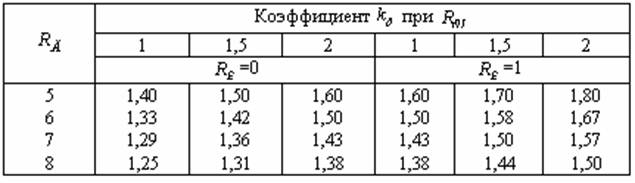
В таблице 5.2 приведены значения ![]() при
при ![]() =1. Наиболее часто применяется следующий формат: 1 старт-бит, восемь разрядовых данных, два стоп-бита. Для этого формата
=1. Наиболее часто применяется следующий формат: 1 старт-бит, восемь разрядовых данных, два стоп-бита. Для этого формата ![]() =1,38.
=1,38.
При скорости обмена 9,6 Кбод по четырехпроводной дуплексной связи расстояние между уровнями не должно превышать ![]() =500 м. Реальная длина межуровневой связи
=500 м. Реальная длина межуровневой связи ![]() =30300 м. Поскольку
=30300 м. Поскольку ![]() >
>![]() последовательный интерфейс обеспечивает и этот параметр канала связи.
последовательный интерфейс обеспечивает и этот параметр канала связи.
Таблица 17.3 - Коэффициент формата данных ИРПС ![]()
Перейдем к рассмотрению вариантов построения приемопередающих устройств (ППУ), реализующих ИРПС. Структурная схема ППУ, которая обеспечивает организацию обмена информацией последовательностями сигналов из старт-стопных, информационных и контрольных разрядов, представлена на рисунке 5.4. Приемопередатчик реализует преобразование параллельного кода в последовательный и выдачу его по двухпроводной линии в режиме передачи, а также прием по другой двухпроводной линии и преобразование асинхронных последовательных сигналов в параллельные в режиме приема.
При поступлении в передатчик сигнала из блока обработки данных схема управления и синхронизации (СУиС) загружает данные в буферный регистр, из которого информация передается в сдвиговый регистр для преобразования параллельного кода в последовательный. Схема выбора длины кодовой комбинации и формирования контрольного бита обеспечивает требуемый формат передаваемой информации. Настройка этих и других схем осуществляется через программный регистр (Прг).
Импульсы сдвига в СУиС формируются в соответствии с частотой передатчика  . Через схему анализа СУиС контролирует состояние регистра передатчика. Выходной каскад передающей части состоит из гальванической развязки, схемы формирования тока и элементов коммутации режима работы, который может быть активным, если источник питания принадлежит устройству, и пассивным в противном случае. Если информация из регистра передатчика полностью выдана, а буферный регистр не был загружен, то работа передающего устройства прекращается, иначе
. Через схему анализа СУиС контролирует состояние регистра передатчика. Выходной каскад передающей части состоит из гальванической развязки, схемы формирования тока и элементов коммутации режима работы, который может быть активным, если источник питания принадлежит устройству, и пассивным в противном случае. Если информация из регистра передатчика полностью выдана, а буферный регистр не был загружен, то работа передающего устройства прекращается, иначе
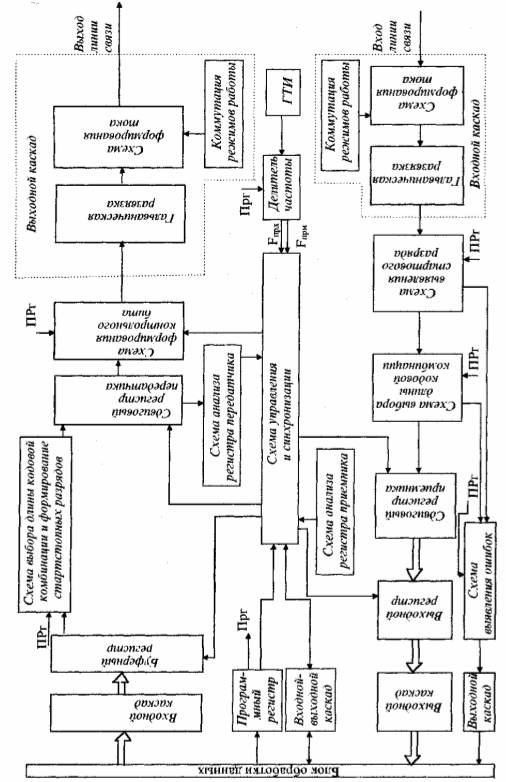
Рис. 17.5 - Структурная схема универсального приемопередатчика
осуществляется загрузка данных с буферного регистра в сдвиговый и процесс передачи продолжается.
Схема выявления стартового бита приемника обнаруживает переход от стопового к стартовому биту, при помощи которого приемник синхронизируется с источником данных, что устраняет влияние небольшого дрейфа генераторов тактовых импульсов (ГТИ). Запускается местный синхрогенератор в СУиС и линия связи стробируется в соответствии с частотой местного синхрогенератора. Частота тактового сигнала приемника ![]() , получаемого из делителя частоты, должна быть кратной чатоте синхрогенератора, например шестнадцатикратной. Это обеспечит стробирование пронимаемых сигналов всегда примерно в середине их длительности. Прежде чем рассинхронизация местного синхрогенератора и синхрогенератора источника данных увеличивается настолько, что явится причиной ошибки, поступает стоповая посылка, означающая конец слова обмена. В приемнике выключается местный синхрогенератор и он снова переходит в режим ожидания стартового бита. Для определения нарушений в формате принятой информации служит схема выявления ошибок, связанная с блоком обработки данных.
, получаемого из делителя частоты, должна быть кратной чатоте синхрогенератора, например шестнадцатикратной. Это обеспечит стробирование пронимаемых сигналов всегда примерно в середине их длительности. Прежде чем рассинхронизация местного синхрогенератора и синхрогенератора источника данных увеличивается настолько, что явится причиной ошибки, поступает стоповая посылка, означающая конец слова обмена. В приемнике выключается местный синхрогенератор и он снова переходит в режим ожидания стартового бита. Для определения нарушений в формате принятой информации служит схема выявления ошибок, связанная с блоком обработки данных.
Оценим допустимое рассогласование частот синхрогенераторов устройств, между которыми организован обмен данными. Для анализа выберем со стороны общей ЭВМ передатчик, а со стороны ТСУ - приемник. Предположим, что частота сигналов в ЭВМ соответствует эталонной частоте. При скорости передачи 9,6 Кбод эталонная тактовая частота равна ![]() =153,6 кГц, т.е. тактовая частота в 16 раз больше скорости передачи информации. Середина битового интервала в передатчике совпадает со спадом 8-го импульса (счет импульсов производится по спаду).
=153,6 кГц, т.е. тактовая частота в 16 раз больше скорости передачи информации. Середина битового интервала в передатчике совпадает со спадом 8-го импульса (счет импульсов производится по спаду).
В приемнике запись входной двоичной информации в сдвиговый регистр производится также по спаду 8-го синхроимпульса стробом. Частота синхрогенератора приемника в общем случае отличается от ![]() . Это приводит к тому, что при приеме слова обмена будет наблюдаться сдвиг моментов появления строба от середины битовых интервалов: если
. Это приводит к тому, что при приеме слова обмена будет наблюдаться сдвиг моментов появления строба от середины битовых интервалов: если ![]() , то строб будет сдвигаться влево от середины битового интервала, если
, то строб будет сдвигаться влево от середины битового интервала, если ![]() , то вправо. Так как передача информации ведется последовательным способом, то очевидно, что отклонение строба от середины будет накапливаться по мере приема разрядов слова обмена, достигая максимального значения при приеме последнего разряда. Для обеспечения правильного приема слова обмена требуется выполнение следующего условия: накопившаяся ошибка рассинхронизации не должна привести при приеме последнего бита слова к смещению строба влево или вправо от середины битового интервала на величину, равную его половине. В противном случае информация последнего разряда будет записана в сдвиговый регистр приемника как информация соседнего разряда или как единица, соответствующая стоповой посылке.
, то вправо. Так как передача информации ведется последовательным способом, то очевидно, что отклонение строба от середины будет накапливаться по мере приема разрядов слова обмена, достигая максимального значения при приеме последнего разряда. Для обеспечения правильного приема слова обмена требуется выполнение следующего условия: накопившаяся ошибка рассинхронизации не должна привести при приеме последнего бита слова к смещению строба влево или вправо от середины битового интервала на величину, равную его половине. В противном случае информация последнего разряда будет записана в сдвиговый регистр приемника как информация соседнего разряда или как единица, соответствующая стоповой посылке.
Число разрядов в последовательной посылке (слове)
R = RСТ + RД + RК.
Число периодов импульсов, формируемых генератором приемника, после отсчета которых будет выработан строб для приема последнего разряда слова, равно ![]()
Предельный интервал времени, определяющий правую границу допустимого смещения строба при приеме последнего разряда, ![]() .
.
Таким образом, минимальное значение частоты приемника получается равным
![]()
а предельный допуск на уменьшение частоты приемника относительно частоты передатчика, выраженный в процентах, имеет вид
![]()
Предельный интервал времени, определяющий левую границу допустимого смещения строба при приеме последнего разряда слова обмена, равен
![]()
Максимальное значение частоты приемника составляет
![]()
а предельный допуск на увеличение частоты приемника относительно частоты передатчика, выраженный в процентах, равен
![]()
Внесем поправку в полученные выражения на несинфазность работы синхрогенераторов приемника и передатчика. Если предположить, что ![]() , то несинфазность приведет к тому, что строб сдвинется влево от середины битового интервала максимум на один период синхронизации. Это приводит к необходимости введения поправки только при расчете
, то несинфазность приведет к тому, что строб сдвинется влево от середины битового интервала максимум на один период синхронизации. Это приводит к необходимости введения поправки только при расчете ![]() . Число периодов импульсов, формируемых генератором приемника, после отсчета которых будет выработан строб для приема последнего разряда слова обмена с учетом несинфазности, составит
. Число периодов импульсов, формируемых генератором приемника, после отсчета которых будет выработан строб для приема последнего разряда слова обмена с учетом несинфазности, составит ![]() . Тогда
. Тогда
![]()
Из полученных выражений видно, что допуски не зависят от принятой скорости передачи информации, а определяются разностью слова обмена.
Малый допуск отклонения частоты генератора, например 5 % при 10 разрядах, приводит к необходимости стабилизации частоты. Применяют генераторы с кварцевыми резонаторами, но во многих случаях можно использовать генератор прямоугольных импульсов без резонатора, если применены другие схемотехнические приемы стабилизации частоты.
Возможны два подхода к реализации ППУ в ТСУ: аппаратно-программный и аппаратный.
При аппаратно-программном способе реализации блока связи с общей ЭВМ функции хранящих (буферных) и сдвиговых регистров ППУ возлагаются на ячейки оперативной памяти ЭВМ. Логическая часть блока связи выполняется на программном уровне посредством специальных программ обмена информацией. Частотная стабильность ППУ определяется стабилизированным генератором импульсов и тактовым устройством управляющей ЭВМ.
Такой подход к организации ППУ приводит к расширению функциональных возможностей блока связи, гибкости процесса обмена, экономии аппаратных средств за счет широкого применения уже имеющегося оборудования, к более полному использованию управляющей ЭВМ.
Структурная схема передатчика в блоке связи приведена на рисунке 5.5. Настройка элемента памяти осуществляется двумя сигналами: «установка 0» и «установка 1». Состояние этого элемента транслируется через выходной каскад в линию связи. При построении запоминающего элемента целесообразно использовать динамический тип памяти с временем хранения ![]() , где
, где ![]() - быстродействие канала связи. Выбор динамической памяти с единичным исходным состоянием не требует дополнительных сигналов начальной установки, которые устанавливали бы в соответствии с требованиями на ИРПС выход передатчика в состояние логической единицы.
- быстродействие канала связи. Выбор динамической памяти с единичным исходным состоянием не требует дополнительных сигналов начальной установки, которые устанавливали бы в соответствии с требованиями на ИРПС выход передатчика в состояние логической единицы.
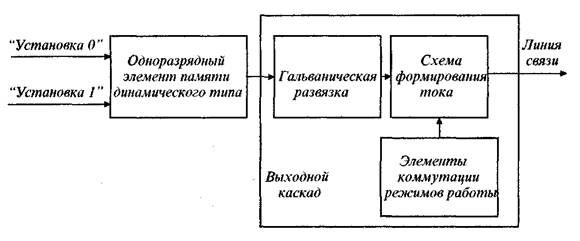
Рисунок 17.6 - Структурная схема передатчика
Процедуру обмена данными можно определить тремя параметрами: разрядностью служебных битов RСТ, RК, RСП; разрядностью RД информационной посылки в слове обмена; скоростью передачи данных ![]() .
.
Программный способ дополнения байта данных служебными разрядами позволяет легко настраивать слово обмена на любой формат и обеспечивать гибкость первого параметра процедуры обмена. В первой рабочей ячейке программно может быть сформировано слово обмена, в котором разрядность информационной посылки произвольна. Это придает гибкость второму параметру.
Продолжительность цикла ![]() определяется временем выполнения команд
определяется временем выполнения команд ![]() (сдвиг третьей рабочей ячейки на один разряд вправо; анализ младшего разряда; выдача сигнала настройки элемента памяти; вычитание единицы из четвертой рабочей ячейки) и временем
(сдвиг третьей рабочей ячейки на один разряд вправо; анализ младшего разряда; выдача сигнала настройки элемента памяти; вычитание единицы из четвертой рабочей ячейки) и временем ![]() задержки в программном таймере:
задержки в программном таймере: ![]() Перед передачей слова или массива данных программный таймер может быть настроен на требуемое значение, что обеспечивает гибкость третьего параметра процедуры обмена:
Перед передачей слова или массива данных программный таймер может быть настроен на требуемое значение, что обеспечивает гибкость третьего параметра процедуры обмена:
![]()
При аппаратно-программной реализации в приемнике блока связи (рисунке 5.6) предусмотрена возможность работы в двух режимах: по прерыванию и по опросу. В режиме прерывания схема формирования запроса подготавливается сигналом «установка З», который выдается программно. Когда в блок связи поступает старт-бит, то он вызывает срабатывание подготовленной схемы формирования запроса, передающей в процессор запрос на прерывание. Этот запрос вызывает прерывание программ, выполняемых в текущий момент, так как программе приема слова обмена присвоен наивысший приоритет. Сигнал «установка З» выдается программно, что позволяет при необходимости не воспринимать (маскировать) запросы приемной части блока связи. Через интервал времени, определяемый программным таймером в приемник поступит сигнал «опрос», который через схему совпадения стробирует состояние линии связи. Если в приемник в текущий момент времени поступила единица, то по связи «выход данных» передается в процессор и далее в сдвиговый регистр приемника, для которого отведена пятая рабочая ячейка. Формируя сигнал «опрос» столько раз, сколько разрядов содержится в слове обмена, сдвиговый регистр накопит принятую информацию.
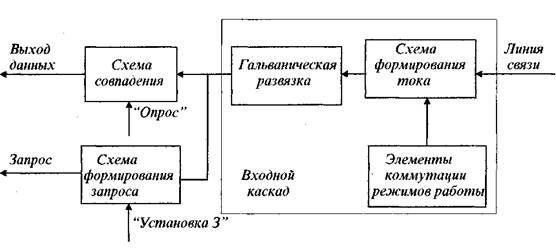
Рисунок 17.7 - Структурная схема приемника
Число стробов «опрос» на одно слово обмена определяется содержимым шестой рабочей ячейки. Программный таймер настроен так, что стробы опроса открывают элемент коммутации для входного каскада примерно в середине интервала каждого разряда слова обмена.
Режим опроса отличается от режима прерывания тем, что старт-бит определяется периодическим опросом линии связи. Изменение ее состояния из единицы в нуль указывает на начало передачи данных из общей ЭВМ.
Аппаратно-программная реализация приемника блока связи обеспечивает гибкость процедуры обмена также по всем трем параметрам, которые рассматривались выше.
Аппаратный способ реализации блока связи с общей ЭВМ предполагает использование БИС, которые могут иметь различные варианты исполнения, например однокристальное программируемое устройство для синхронно-асинхронных приемопередающих интерфейсов связи на БИС К580ИК51 или БИС асинхронного приемопередатчика К1002ХЛ1. Во многих случаях БИС согласуются с определенными типами микро-ЭВМ. Эти схемы работают с максимальной скоростью 9,6 и 19,2 Кбод.
Асинхронный приемопередатчик К1002ХЛ1 состоит из приемника и передатчика, которые имеют отдельные входы тактовых частот и могут работать с различными скоростями обработки информации. Микросхема работает в полном дуплексном режиме, т.е. одновременно преобразует входную параллельную информацию в последовательную стартстопную комбинацию в передатчике и входную последовательную комбинацию в параллельный код в приемнике.
Двоичный разряд в приемнике регистрируется в середине битового интервала с допуском (0,5Т, где Т - период тактовой частоты. В приемной части БИС предусмотрена защита от ложного старта. Стартовый бит считается достоверным, если при опросе середины его битового интервала подтверждается наличие низкого уровня напряжения. В противном случае дальнейший прием стартстопной комбинации прекращается и схема приемника возвращается в исходное состояние. Достоверность стопового элемента проверяется по наличию в середине первого стопового единичного элемента напряжения высокого уровня. В противном случае сообщается об ошибке в приеме стопового бита.
Микросхема имеет внешнее, общее для передатчика и приемника программирование, команды которого записываются и запоминаются в программном регистре. Программирование предусматривает режимы работы: выбор длины информационной посылки (5-8 бит); проверка на четность-нечетность в приемнике и формирование элемента проверки на четность-нечетность в передатчике; запрет проверки и формирование элемента проверки на четность-нечетность; выбор числа стоповых элементов (1; 1,5; 2); разрешение-запрет интегрирования.
В БИС предусмотрено автоматическое формирование и запоминание следующих флаговых состояний: буферный регистр передатчика свободен; передающий регистр свободен; информация принята; ошибка в стоповой посылке; ошибка в проверке на четность-нечетность; ошибка переполнения; выход стартстопного триггера.
На рисунке 5.7 приведен один из вариантов принципиальной схемы оконечных каскадов приемопередающего устройства. Приемник должен «терпеть» замыкание входной цепи. Источник сигнального тока должен «терпеть» отключение нагрузки, короткое замыкание выходов или замыкание выхода на землю, т.е. после устранения неисправности в линии связи источник и приемник должны быть сразу готовы к работе.
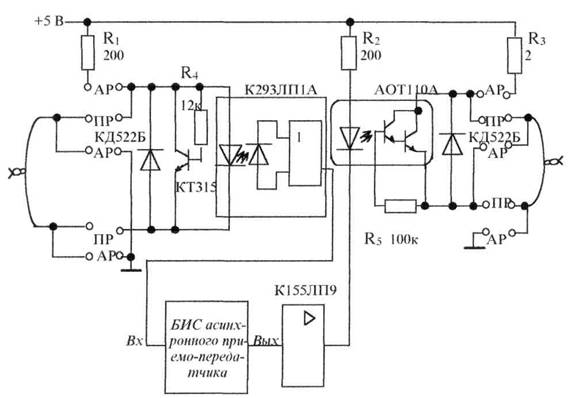
Рисунок 17.8 - Схема оконечных каскадов приемопередающего устройства
АР - активный режим; ПР - пассивный режим.